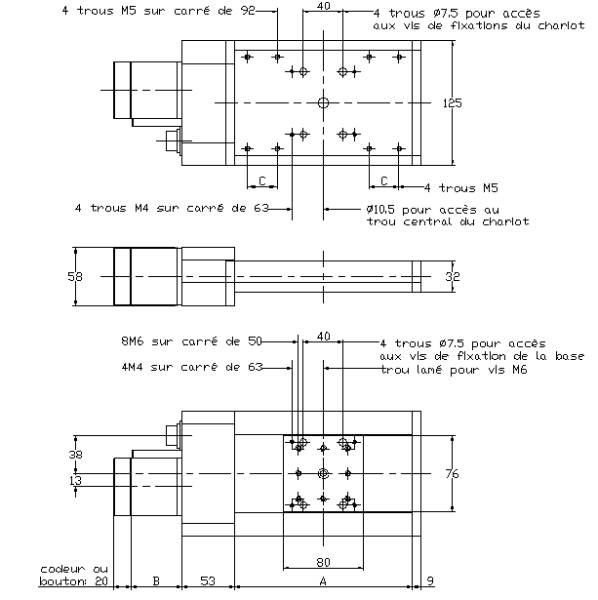
La série TMF 3 utilise des rails de type R3 qui lui permettent de transporter des charges jusqu’à 20 kg pour des courses de 50 à 200 mm.
Cette série peut utiliser plusieurs types de motorisation lui permettant de couvrir tous les domaines d’application, depuis la motorisation d’un déplacement manuel jusqu’au micropositionnement de précision avec contrôle dynamique de la trajectoire.
Les différents types de motorisation, pas à pas, courant continu, ou servomoteur sont à entraînement direct, c’est-à-dire sans aucun système de réduction, ce qui évite les problèmes liés à l’usure et au jeu des pignons.
Les systèmes de motorisation pas à pas peuvent être utilisés dans les applications de mise en station, micropositionnement ou de déplacement point à point où les contraintes de vitesse de déplacement et de vibration ne sont pas trop exigeantes.
La motorisation à courant continu : suppression de l’électronique de puissance.
La motorisation par servomoteur sera préférée dans les applications qui demandent des accélérations importantes, de grandes dynamiques vitesse/résolution, et des mouvements exempts de vibrations.
D’autres motorisations sont disponibles pour répondre à vos exigences spécifiques, d’encombrement, de charge embarquée, etc…
Moteur pas à pas en direct version plate : applications horizontales avec faible charge.
Moto-réducteur à courant continu : suppression de l’électronique de puissance.
Moteur sur le côté.
Motorisation pour vide.