



Vis terminale pour application horizontale et verticale avec ou sans racleur. Se monte seulement sur le rail le plus long. N’existe pas en taille 1 et 2.

Vis pour compenser les écarts d’entraxe sur la structure.
| 1 | → | Codeur A | |
| 2 | → | Codeur B | |
| 3 | → | Index | |
| 4 | ← | Alim codeur | |
| 5 | — | Blindage codeur | |
| 6 | → | Retour Fin de Courses + Origine (0 Volt) | |
| 7 | → | Origine (NPN N.F.) | |
| 8 | — | N.C. | |
| 9 | ← | Boost | |
| 10 | ← | Inhibition | |
| 11 | ← | Sens | |
| 12 | ← | Impulsions | |
| 13 | → | 24 Volts | |
| 14 | → | Codeur A | En cas d’option codeur sur le moteur |
| 15 | → | Codeur B | |
| 16 | → | Index | |
| 17 | ← | 0V codeur | |
| 18 | → | Fin de course + (N.F.) | |
| 19 | → | Fin de course – (N.F.) | |
| 20 | — | N.C. | |
| 21 | ← | Retour Boost | |
| 22 | ← | Retour Inhibition | |
| 23 | ← | Retour Sens | |
| 24 | ← | Retour Impulsions | |
| 25 | → | 0 Volt |

| M | → | Phase moteur A1 | |
| A | → | Phase moteur A2 | |
| B | → | Phase moteur B1 | |
| C | → | Phase moteur B2 | |
| L | → | Terre | |
| D | ← | Fin de course moins | |
| R | ← | Fin de course plus | |
| V | ← | Retour fin de course | |
| U | → | 0V codeur | |
| J | ← | Origine | |
| K | → | Alim codeur (+5 Volts) + origine | En cas d’option codeur sur le moteur |
| E | ← | Codeur A | |
| S | ← | Codeur B | |
| T | ← | Index | |
| F | ← | Codeur A complémenté | |
| G | ← | Codeur B complémenté | |
| H | ← | Index complémenté |

| Motorisation | Résolution (µ) | Répétabilité (µ) | Hystérésis (µ) | Vitesse max (mm/sec) |
| Pas à pas | 0,4 * | 0,1 | 0,5 | 50 |
| Servomoteur et codeur rotatif | 2,5 – 1 ** 5 – 2 ** | *** *** | 0,5 0,5 | 100 200 |
| Servomoteur et règle linéaire | 0,1 | *** | 0,5 | 40 |
| Motoréducteur à courant continu | 0,16 – 0,08 – 0,04 ** 0,8 – 0,4 – 0,2 ** | 0,1 *** | 5 25 | 8 40 |
 {tab title= »Vis GB » class= »red solid »}
Vis terminale pour applications horizontales et verticales avec de grandes accélérations. N’existe pas en taille1.
{tab title= »Vis GB » class= »red solid »}
Vis terminale pour applications horizontales et verticales avec de grandes accélérations. N’existe pas en taille1.
 {tab title= »Vis GC » class= »red solid »}
Vis terminale pour application horizontale et verticale avec ou sans racleur. Se monte seulement sur le rail le plus long. N’existe pas en taille 1 et 2.
{tab title= »Vis GC » class= »red solid »}
Vis terminale pour application horizontale et verticale avec ou sans racleur. Se monte seulement sur le rail le plus long. N’existe pas en taille 1 et 2.
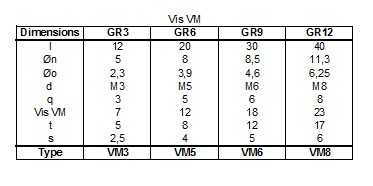
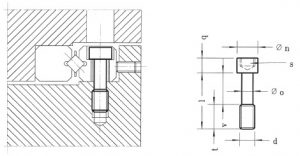
 {tab title= »Vis VM » class= »red solid »}
Vis pour compenser les écarts d’entraxe sur la structure.
{tab title= »Vis VM » class= »red solid »}
Vis pour compenser les écarts d’entraxe sur la structure.
 {/tabs}
{/tabs} 

